#! /usr/bin/python3
# ============================================================
# 1. test graphics transformations
# 2. manipulate/draw a cube's surfaces (polygons)
# 3. test using a normal vector for each surface to determine
# if a surface is visible to the viewer. If not, do not
# render (draw) it.
#
# ============================================================
import coordinate_conversion as cc
import transformation_matrix as tm
import user_interface as ui
from graphics import *
import numpy as np
import sys
WINHEIGHT = 801 # graphics window height
WINWIDTH = 801 # graphics window width
PEEK = True
# ------------------------------------------------------------
# ---- cube
# ----
# ---- notes:
# ---- 1. Cartesian coordinates
# ---- 2. coordinates are of a size so they do not need to be
# ---- scaled to fit in the graphics window
# ---- 3. the pivot point coordinates are the center of a
# ---- graphics object and is used when rotating it's
# ---- wireframe in place (not needed at the origin)
# ------------------------------------------------------------
# ---- cube 8 surface's corner points
pts = [ (-100, 100, 100), (-100, 100,-100),
( 100, 100,-100), ( 100, 100, 100),
(-100,-100, 100), (-100,-100,-100),
( 100,-100,-100), ( 100,-100, 100) ]
# ---- cube's pivot point
PIVOT_POINT = (0, 0, 0)
# ---- cube 6 surfaces
# ------ [0] top
# ------ [1] bottom
# ------ [2] back
# ------ [3] front
# ------ [4] left
# ------ [5] right
# ---- surface points are in clockwise order as viewed
# ---- from outside the cube. they define a flat surface.
# ---- surface fields are: surface points, surface color,
# ---- surface name
CUBE_SURFACES = [
((pts[0],pts[1],pts[2],pts[3]), # top
'red','top'),
((pts[4],pts[7],pts[6],pts[5]), # bottom
'blue','bottom'),
((pts[1],pts[5],pts[6],pts[2]), # back
'black','back'),
((pts[0],pts[3],pts[7],pts[4]), # front
'green','front'),
((pts[0],pts[4],pts[5],pts[1]), # left
'yellow','left'),
((pts[3],pts[2],pts[6],pts[7]), # right
'cyan','right')]
# ============================================================
# Three points can define a plane. If they do, you can
# calculate a vector perpendicular to the plane. If the points
# do not form a plane the cross product vector is [0,0,0].
#
# The vector can be used to determine if a plane is facing
# the viewer or not. With solid object made up of thousands
# surfaces, you can determine which surfaces need to be
# rendered and which ones do not. This can make rendering the
# object more efficient. You don't need to draw all of the
# triangles.
# ============================================================
def calc_cross_product(p1,p2,p3,verbose=False):
if verbose:
print('calc_cross_product()')
print(f'p1 = {p1}')
print(f'p2 = {p2}')
print(f'p3 = {p3}')
# ---- get two vectors in the plane relative to point p1
v1 = [p3[0]-p1[0],p3[1]-p1[1],p3[2]-p1[2]]
v2 = [p2[0]-p1[0],p2[1]-p1[1],p2[2]-p1[2]]
if verbose:
print(f'v1 = {v1}')
print(f'v2 = {v2}')
# ---- the cross product is a vector perpendicular
# ---- to the plane
cp = np.cross(v1,v2)
if verbose:
x = cp[0]
y = cp[1]
z = cp[2]
print(f'cross product = [ x={x},y={y},z={z} ]')
return cp
# ------------------------------------------------------------
# ---- XYZ 3D axes
# ----
# ---- notes:
# ---- 1. Cartesian coordinates
# ---- 2. the origin (0,0,0) is the center of the
# ---- graphics window
# ------------------------------------------------------------
AXES = (((-300,0,0),(300,0,0)), # X axis
((0,-300,0),(0,300,0)), # Y axis
((0,0,-300),(0,0,300))) # Z axis
# ------------------------------------------------------------
# ---- class - 3D transformation matrix
# ----
# ---- notes:
# ---- 1. Cartesian coordinates
# ------------------------------------------------------------
class TransformationMatrix3D:
# ---- initialize the class (create an identity matrix)
def __init__(self):
self.mtrx = np.identity(4)
#---- reset matrix to initial condition
def reset(self):
self.mtrx = np.identity(4)
# ---- transform a point's coordinates using the
# ---- transformation matrix
def transform_coords(self,x,y,z):
p = self.mtrx @ [x,y,z,1]
return (p[0],p[1],p[2])
# ---- modify transformation matrix
# ---- change the location (coordinates) of a point
# ---- Note: DX,DY,DZ are the change in a point's
# ---- current X,Y,Z coordinates
def translate_to_location(self,dx,dy,dz):
m = tm.get_translation_matrix_3d(dx,dy,dz)
mm = m @ self.mtrx
self.mtrx = mm
# ---- modify transformation matrix
# ---- move a point to the origin (0,0,0)
# ---- Note: X,Y,Z are a point's current
# ---- location (coordinates)
def translate_to_origin(self,x,y,z):
m = tm.get_translation_matrix_3d(-x,-y,-z)
mm = m @ self.mtrx
self.mtrx = mm
# ---- modify transformation matrix
# ---- rotate around the X axis
def rotate_around_x_axis(self,degrees):
m = tm.get_x_rotation_matrix_3d(degrees)
mm = m @ self.mtrx
self.mtrx = mm
# ---- modify transformation matrix
# ---- rotate around the Y axis
def rotate_around_y_axis(self,degrees):
m = tm.get_y_rotation_matrix_3d(degrees)
mm = m @ self.mtrx
self.mtrx = mm
# ---- modify transformation matrix
# ---- rotate around the Z axis
def rotate_around_z_axis(self,degrees):
m = tm.get_z_rotation_matrix_3d(degrees)
mm = m @ self.mtrx
self.mtrx = mm
# ---- modify transformation matrix
# ---- scale a point's coordinates in the X,Y,Z direction
def scale_xyz(self,sx,sy,sz):
m = tm.get_scaling_matrix_3d(sx,sy,sz)
mm = m @ self.mtrx
self.mtrx = mm
# ---- return a deepcopy of the current
# ---- transformation matrix
def deepcopy_matrix(self):
return copy.deepcopy(self.mtrx)
# ---- return a shallow copy of the current
# ---- transformation matrix
def copy_matrix(self):
return self.mtrx
# ---- display the current transformation matrix
def display_matrix(self):
print(self.mtrx)
# ------------------------------------------------------------
# ---- draw XYZ 3D axes
# ----
# ---- Note:
# ---- 1. axes Cartesian coordinates
# ---- 2. the origin (0,0,0) is assumed to be at the center
# ---- of the graphics window
# ---- 3. viewer is assumed to be at +Z infinity
# ------------------------------------------------------------
def draw_xyz_axes(win, mtrx, axes, width=2,
color='black', draw_z_axis=False):
axis_objs = []
# ---- draw X axis (line)
xaxis = axes[0]
x0 = cc.center_to_win_coords(xaxis[0][0],xaxis[0][1],
win.width,win.height)
x1 = cc.center_to_win_coords(xaxis[1][0],xaxis[1][1],
win.width,win.height)
lobj = Line(Point(x0[0],x0[1]),Point(x1[0],x1[1]))
lobj.setWidth(width)
lobj.setFill(color)
lobj.draw(win)
axis_objs.append(lobj)
# ---- draw Y axis (line)
yaxis = axes[1]
y0 = cc.center_to_win_coords(yaxis[0][0],yaxis[0][1],
win.width,win.height)
y1 = cc.center_to_win_coords(yaxis[1][0],yaxis[1][1],
win.width,win.height)
lobj = Line(Point(y0[0],y0[1]),Point(y1[0],y1[1]))
lobj.setWidth(width)
lobj.setFill(color)
lobj.draw(win)
axis_objs.append(lobj)
# ---- draw Z axis (line)
if draw_z_axis:
zaxis = axes[2]
z0 = cc.center_to_win_coords(zaxis[0][0],zaxis[0][1],
win.width,win.height)
z1 = cc.center_to_win_coords(zaxis[1][0],zaxis[1][1],
win.width,win.height)
lobj = Line(Point(z0[0],z0[1]),Point(z1[0],z1[1]))
lobj.setWidth(width)
lobj.setFill(color)
lobj.draw(win)
axis_objs.append(lobj)
return axis_objs
# ------------------------------------------------------------
# ---- draw graphics window 2D axes
# ----
# ---- Note:
# ---- 1. the origin (0,0,0) is assumed to be at the center
# ---- of the graphics window
# ---- 2. no Z axis drawn
# ---- viewer is assumed to be at +Z infinity
# ------------------------------------------------------------
def draw_graphics_window_axes(win, width=1 ,
color='black', labels=False):
wx = win.width # window width
wy = win.height # window height
wcx = round(wx/2.0) # window center X
wcy = round(wy/2.0) # window center Y
axis_objs = []
# ---- X axis
xl = Line(Point(0,wcy),Point(wx-1,wcy))
xl.setWidth(width)
xl.setFill(color)
xl.draw(win)
axis_objs.append(xl)
if labels:
txt = Text(Point(wx-20,wcy),'X')
txt.setFace('courier')
txt.setSize(24)
txt.setTextColor(color)
txt.draw(win)
axis_objs.append(txt)
# ---- Y axis
yl = Line(Point(wcx,0),Point(wcx,wy-1))
yl.setWidth(width)
yl.setFill(color)
yl.draw(win)
axis_objs.append(yl)
if labels:
txt = Text(Point(wcx,20),'y')
txt.setFace('courier')
txt.setSize(24)
txt.setTextColor(color)
txt.draw(win)
axis_objs.append(txt)
return axis_objs
# ------------------------------------------------------------
# ---- create a polygon (4 points) (X,Y,Z Cartesian coords)
# ---- viewer is at +Z infinity, no Perspective adjustment
# ------------------------------------------------------------
def create_polygon(win, mtrx, surface_points,
width=2, color='green', draw_obj=True):
# ---- convert Cartesian coords to window coords
window_polygon_points = []
for pt in surface_points:
wx,wy = cc.center_to_win_coords(pt[0],pt[1],
win.width,win.height)
# ---- save list of points
window_polygon_points.append(Point(wx,wy))
# ---- create polygon graphics object
pobj = Polygon(window_polygon_points)
pobj.setOutline('black')
pobj.setWidth(width)
pobj.setFill(color)
if draw_obj: pobj.draw(win)
return pobj # return polygon graphics object
# ------------------------------------------------------------
# ---- draw surfaces (Cartesian coordinates)
# ---- viewer is at +Z infinity, no Perspective adjustment
# ------------------------------------------------------------
def draw_surfaces(win,mtrx,surfaces):
polygon_objs = []
for surface in surfaces:
# ---- modify surface point's Cartesian coordinates
# ---- using transformation matrix
new_polygon_pts = []
for pt in surface[0]:
new_pt = mtrx.transform_coords(pt[0], # x
pt[1], # y
pt[2]) # z
new_polygon_pts.append(new_pt)
# ---- draw the surface?
# ---- determined by the surface's normal vector
# ---- can the viewer see the surface?
cp = calc_cross_product(new_polygon_pts[0], # pt 0
new_polygon_pts[1], # pt 1
new_polygon_pts[2]) # pt 2
if PEEK:
print('-'*60)
print(f'surface {surface[2]:6}')
print(f'normal vector {cp}')
# ---- create/draw a surface?
if cp[2] > 0:
if PEEK: print(f'draw color={surface[1]}')
pobj = create_polygon(win,mtrx,new_polygon_pts,
color=surface[1])
polygon_objs.append(pobj)
else:
if PEEK:
print(f'do not draw (color={surface[1]})')
return polygon_objs
# ------------------------------------------------------------
# ---- delete graphics objects from graphics window
# ------------------------------------------------------------
def clear_graphics_window(objs):
for o in objs:
o.undraw()
objs = []
# ------------------------------------------------------------
# ---- menu interface
# ------------------------------------------------------------
def menu_interface():
extra_menu_items = False
menu = '''
------------------------------------------------
---------- test Transformation Matrix ----------
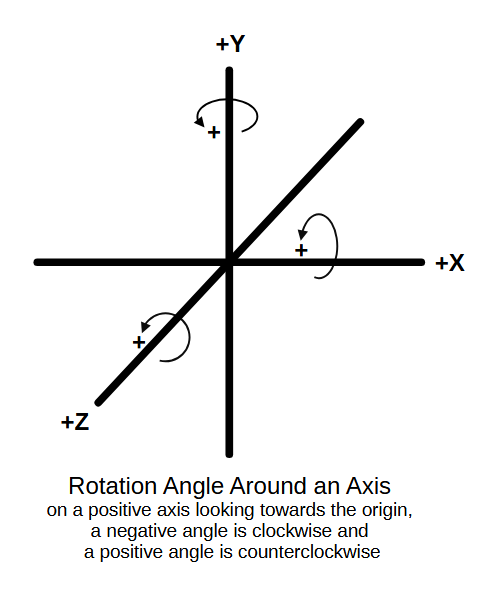
Negative rotation angles rotate objs clockwise.
Positive angles rotate objs counterclockwise.
DX, DY, DZ are changes in an obj's current
location, not an absolute location.
------------------------------------------------
q = quit
i = reset to initial conditions
d = draw cub surfaces
m = display transformation matrix
c = clear the graphics window (undraw)
--------- Build Transformation Matrix ----------
rx angle = rotate around X axis (deg)
ry angle = rotate around Y axis (deg)
rz angle = rotate around Z axis (deg)
t dx dy dz = move graphics object
s sx sy sz = scale graphics object'''
extra_menu = '''
o move to origin
rip rotate in place
all display extra menu options'''
# ---- menu support function - oops!
def _oops(s):
print()
print(f'OOPS! unknown/bad command ({s})')
ui.pause()
# ---- graphics object lists
ax_objs = [] # axis graphics objects
gr_objs = [] # other graphics objects
# ---- create graphics window
win = GraphWin('wireframe Transformation Test',
WINWIDTH, WINHEIGHT)
win.setBackground('white')
# ---- create X,Y,Z coordinate transformation matrix
mtrx = TransformationMatrix3D()
# ---- draw X,Y,Z coordinate axes
##ax_objs = draw_xyz_axes(win,mtrx,AXES)
ax_objs = draw_graphics_window_axes(win)
# ---- display the menu
# ---- ask the user to make a selection
# ---- process the selection
while True:
##ui.clear_screen()
print(menu)
if extra_menu_items:
print(extra_menu)
# ---- ask the user to make a selection
print()
s = ui.get_user_input('Enter command: ')
if not s: break # empty string?
# ---- lowercase the user's input
ss = s.lower()
# ---- quit
if ss[0] == 'q': break
# ---- display transformation matrix
if ss[0] == 'm':
print('-'*44)
mtrx.display_matrix()
print('-'*44)
ui.pause()
continue
# ---- create/draw surfaces
if ss[0] == 'd':
objs = draw_surfaces(win,mtrx,CUBE_SURFACES)
gr_objs += objs
continue
# ---- reset matrix to initial state
if ss[0] == 'i':
mtrx.reset()
continue
# ---- clear graphics window
if ss == 'c':
##clear_graphics_window(ax_objs)
clear_graphics_window(gr_objs)
continue
# ---- add rotation to transformation matrix
if ss[0] == 'r':
x = ss.replace(',', ' ').split()
if len(x) != 2:
_oops(s)
continue
tf,deg = ui.is_float(x[1])
if not tf:
_oops(s)
continue
if x[0][1] == 'x':
print('rotate around X axis')
mtrx.rotate_around_x_axis(deg)
continue
if x[0][1] == 'y':
print('rotate around Y axis')
mtrx.rotate_around_y_axis(deg)
continue
if x[0][1] == 'z':
print('rotate around Z axis')
mtrx.rotate_around_z_axis(deg)
continue
# ---- add X,Y,Z movement to transformation matrix
if ss[0] == 't':
x = ss.replace(',', ' ').split()
if len(x) != 4:
_oops(s)
continue
tf,dx = ui.is_float(x[1]) # DX
if not tf:
_oops(s)
continue
tf,dy = ui.is_float(x[2]) # DY
if not tf:
_oops(s)
continue
tf,dz = ui.is_float(x[3]) # DZ
if not tf:
_oops(s)
continue
mtrx.translate_to_location(dx,dy,dz)
continue
# ---- move to origin
if ss[0] == 'o':
print('exercise for the student')
continue
# ---- rotate in place
if ss[0] == 'rip':
print('exercise for the student')
continue
# ---- toggle the display of extra menu items
if ss == 'all' or ss == 'extra':
extra_menu_items = not extra_menu_items
continue
# ---- OOPS!
_oops(s)
# ---- close graphics window
win.close()
# ------------------------------------------------------------
# ---- main
# ------------------------------------------------------------
if __name__ == '__main__':
menu_interface()
print()
For other wireframe objects click
HERE
 .
Convert them to surfaces.
.
Convert them to surfaces.